ジャイロ センサ ドリフト

09年07月 もやねのロボット三昧

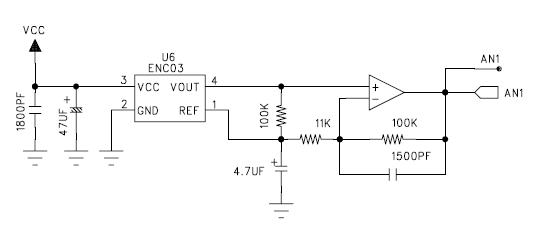
ジャイロセンサ Enc 03r のドリフト補正 その3 からくり小箱
3軸 ジャイロ スコープ 加速度 センサー モジュール ピンヘッダ ドリフト 回路 角速度 ベクトル 姿勢 データ 処理 Mpu 6050 通販 Lineポイント最大0 5 Get Lineショッピング

09 0925号 ジャイロセンサのドリフト抑制方法 Astamuse

東芝 角度を直接検出する高精度ジャイロセンサーの小型モジュールを開発 Motor Fantech モーターファンテック
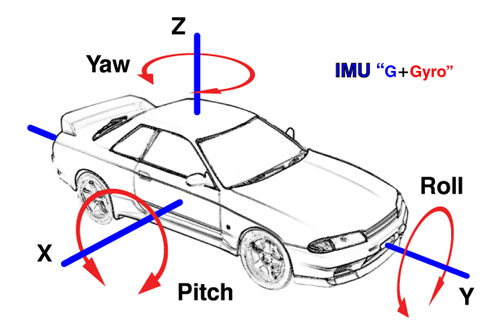
ロボットのための慣性計測装置 Imu 入門 Myenigma
ジャイロの精度 概要・技術解説 ジャイロの精度を表す用語 1.スケールファクタ誤差、2.零点誤差とドリフト、3.直線性誤差、4.分解能 について簡単に説明します。 1.スケールファクタ誤差.

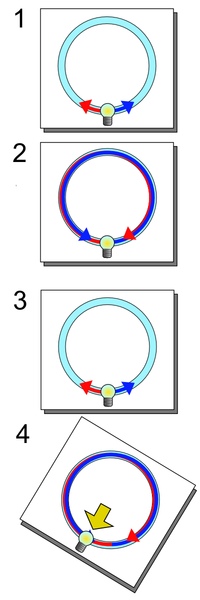
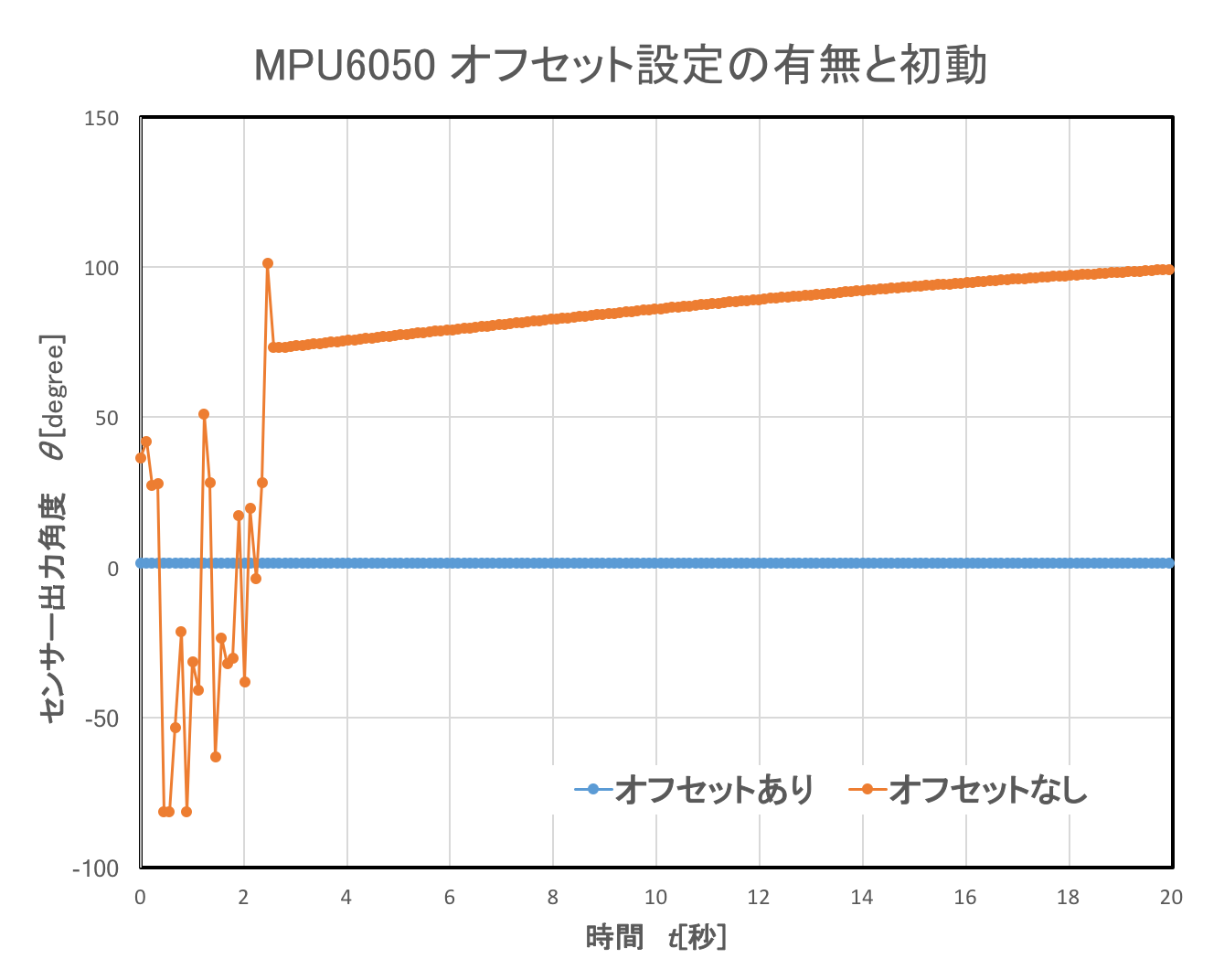
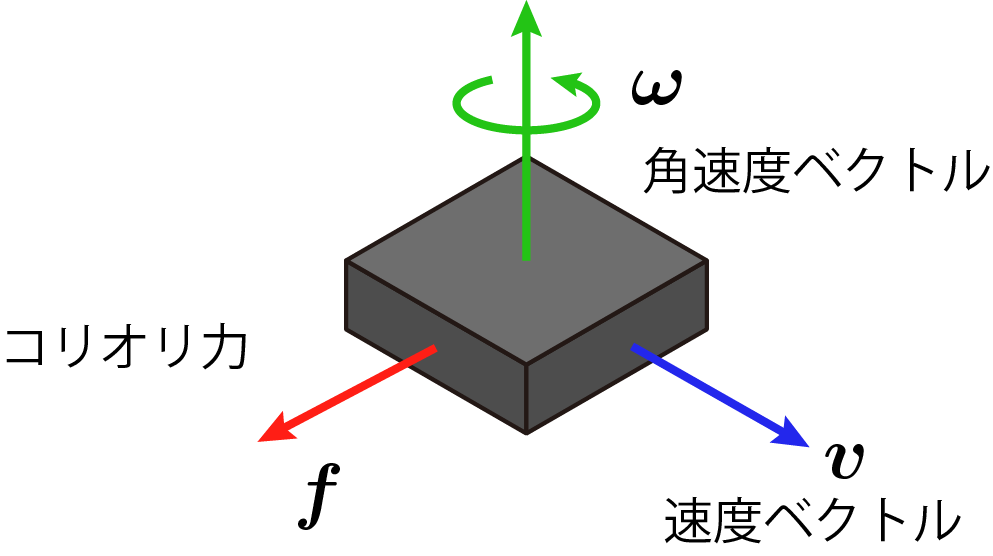
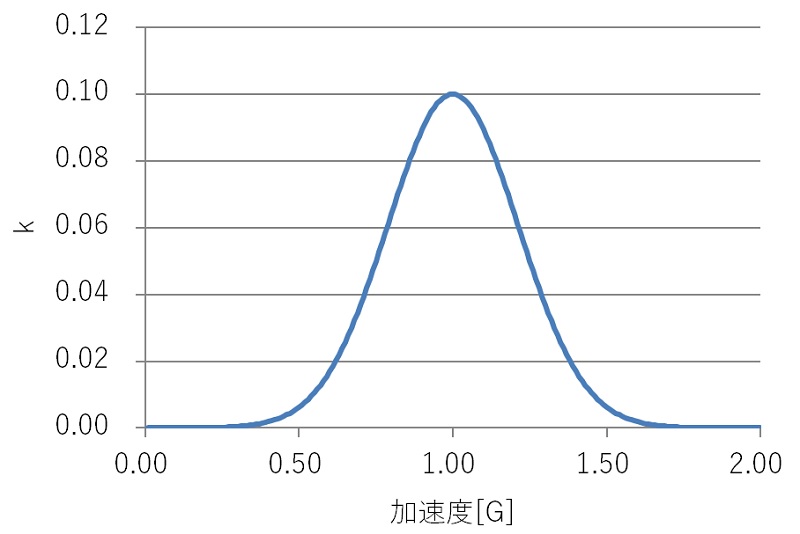
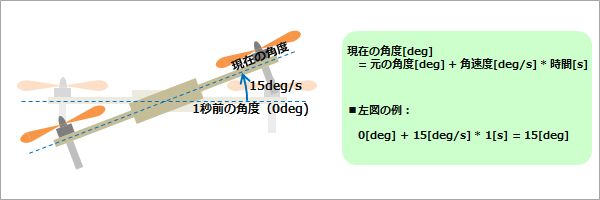
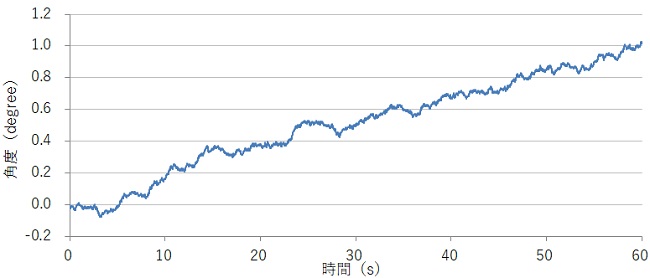
ジャイロ センサ ドリフト. 目をジャイロセンサのドリフト特性と計測する動作の速度か ら設定する. まず,測定対象とする動作や使用センサなどの条件を設定 する.本手法では 3軸加速度センサと 軸ジャイロセンサを 用いた人の動作計測を想定し,計測対象は1 軸周りの平面的. ずばり、「ドリフト」です。 角速度センサは「積分方式」で回転角度を検出します。 どういうことかというと、「15度動いた」「度動いた」「10度動いた」を合わせて「45度動いた」といった風に、足し算で算出します。 しかし、みんなの敵である「誤差. ジャイロセンサのドリフトによる誤差を補正するための方法として,加速度センサの重力加速度と地磁気セン サの磁場を用いて補正するセンサ・フュージョンが提案されており,2 軸ジャイロセンサ,2 軸加速度センサから.
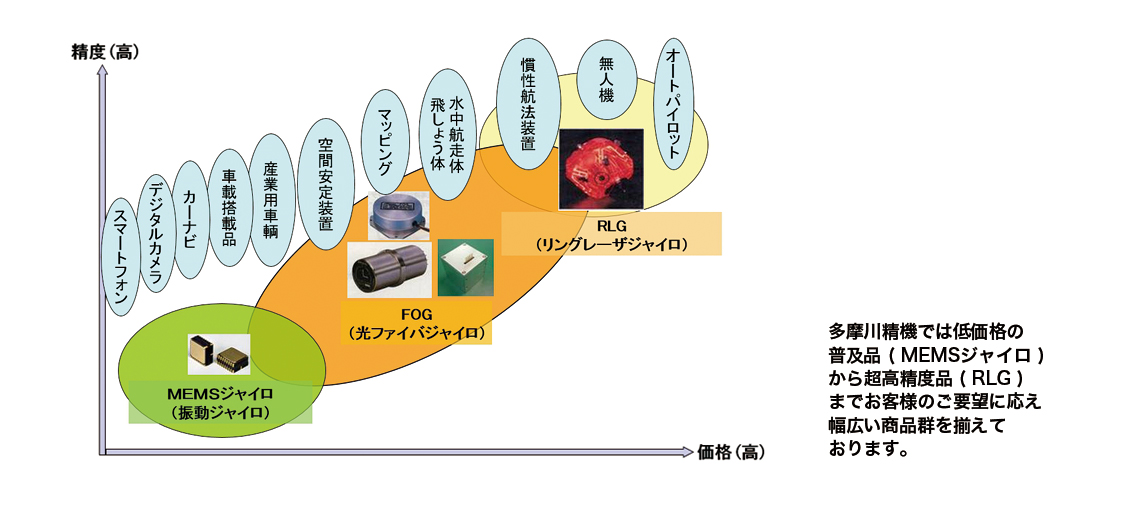
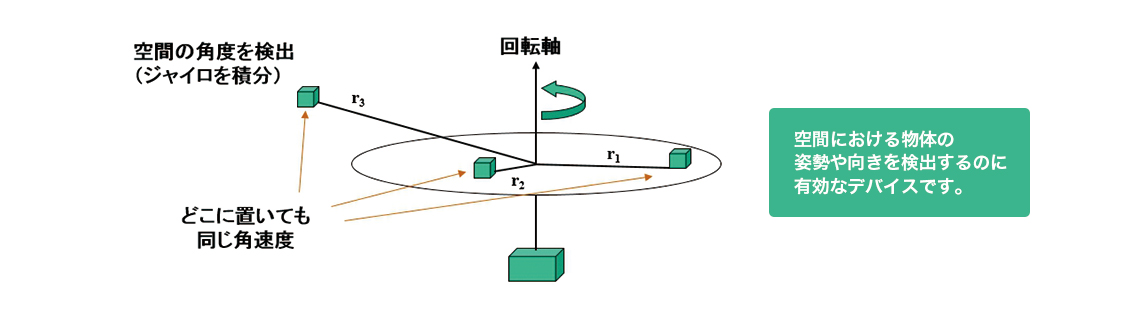
ジャイロセンサとは? ジャイロ これに使われるジャイロは角度ならびに角速度の検出範囲は狭くてもよいが、ドリフトは極限まで小さくする必要があった。この種のジャイロをプラットホーム用ジャイロと呼んでいた。. EV3ジャイロセンサーとHiTechnic社製ジャイロセンサーとの比較 EV3ジャイロセンサー HiTechnicジャイロセンサー 最大角速度 440度/秒 360度/秒 測定回数 1000回/秒 300回/秒 EV3ジャイロセンサーとHiTechnicジャイロセンサーを同時に回転させて. ずばり、「ドリフト」です。 角速度センサは「積分方式」で回転角度を検出します。 どういうことかというと、「15度動いた」「度動いた」「10度動いた」を合わせて「45度動いた」といった風に、足し算で算出します。 しかし、みんなの敵である「誤差.
概要 6軸IMU(慣性センサ)=3軸加速度センサ 3軸ジャイロセンサに対して拡張カルマンフィルタをかけてセンサ融合(Sensor Fusion)またはデータ同化(Data Assimilation)を行う。3軸加速度センサにてセンサローカル座標系(センサ座標系と称す)の3軸における重力加速度gの分量が出力され、観測方程式. ジャイロセンサを使う場合は, 10秒で2度の零点ドリフト 製作者の勘で決めればよい.経験値の差が現れる. 例えば,こじまうす7の場合は... 0 deg 2 deg. ジャイロセンサを使う場合は, 10秒で2度の零点ドリフト 製作者の勘で決めればよい.経験値の差が現れる. 例えば,こじまうす7の場合は... 0 deg 2 deg.
EV3ジャイロセンサーとHiTechnic社製ジャイロセンサーとの比較 EV3ジャイロセンサー HiTechnicジャイロセンサー 最大角速度 440度/秒 360度/秒 測定回数 1000回/秒 300回/秒 EV3ジャイロセンサーとHiTechnicジャイロセンサーを同時に回転させて. ジャイロの精度 概要・技術解説 ジャイロの精度を表す用語 1.スケールファクタ誤差、2.零点誤差とドリフト、3.直線性誤差、4.分解能 について簡単に説明します。 1.スケールファクタ誤差.

Jpb2 ジャイロセンサのドリフト抑制方法 Google Patents
ロボジョイくらぶ マイスターブログ 90度その場せん回とジャイロの暴走について

Amazon Witmotion Hwt901b Rs485 Modbus版 9 36v 高精度mpu9250傾斜計 ミリタリーグレード3軸ジャイロ 加速度計 角度 磁力計 気圧 高度 Uartシリアルahrs 0hzデジタル出力 Z角度の低ドリフト センサ 産業 研究開発用品 通販
ジャイロのドリフト補正を改良 自作のいろいろ
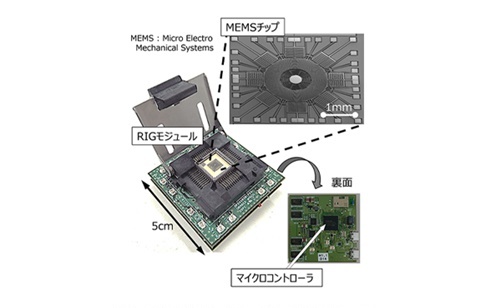
ドローンにも搭載できる角度直接検出型の高精度ジャイロセンサー Monoist
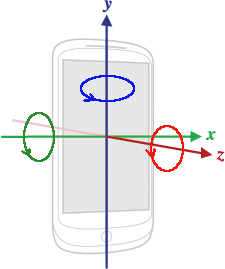
Android Gyroscope ジャイロセンサー
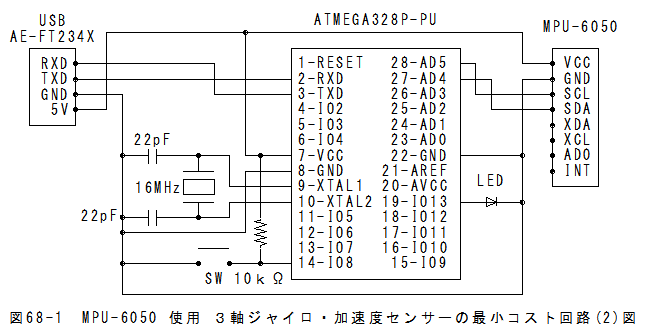
68章 Mpu 6050 使用 3軸ジャイロ 加速度センサーの低コスト回路 2

ジャイロセンサ Enc 03r のドリフト補正 その4 からくり小箱
ジャイロセンサとは ジャイロについて 技術情報 各種インフォメーション エプソン水晶デバイス
倒立振子 角度の推定 Kftamang Blog
6軸センサーから3軸回転の傾き角度算出とドリフト補正方法 自作のいろいろ
Arduino Mpu6050でyaw軸imu Yunit Tech Blog

ジャイロセンサ Enc 03r のドリフト補正 その3 からくり小箱
6軸センサーから3軸回転の傾き角度算出とドリフト補正方法 自作のいろいろ
ロボジョイくらぶ マイスターブログ 90度その場せん回とジャイロの暴走について
技術情報 ジャイロセンサとは 原理 種類 特徴の解説は多摩川精機

ジャイロセンサのサンプル間温度ドリフトばらつき Petit Lab

ジャイロセンサ Enc 03r のドリフト補正 その2 からくり小箱
ジャイロセンサの基礎 株式会社スポーツセンシング
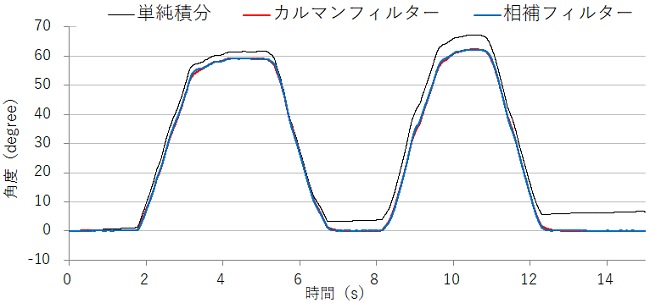
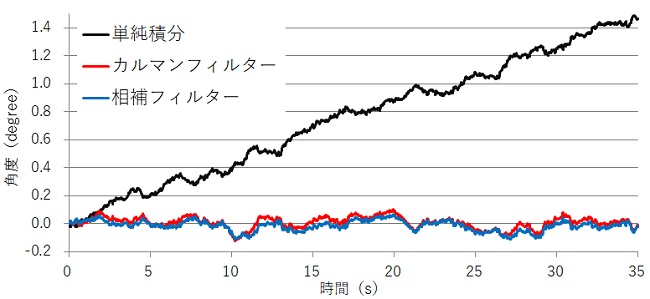
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ
ジャイロセンサ Ae Gyro Smd のドリフト補正 最小二乗法予測 Youtube

ジャイロセンサ Enc 03r のドリフト補正 その3 からくり小箱
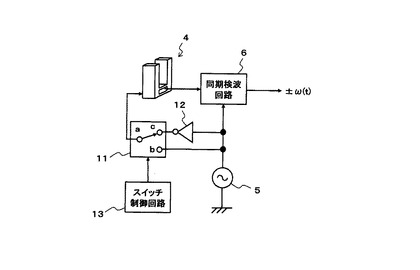
ジャイロセンサのドリフト抑制方法

1996 号 ジャイロのドリフト補正方法及び補正回路 Astamuse
ジャイロのドリフト補正を改良 自作のいろいろ

09年07月 もやねのロボット三昧

02 号 振動ジャイロおよびその温度ドリフト調整方法 Astamuse

ジャイロセンサのドリフト補正 からくり小箱

08 号 センサドリフト補正装置及び補正方法 Astamuse
ジャイロセンサのチェックポイント ジャイロについて 技術情報 各種インフォメーション エプソン水晶デバイス

09年07月 もやねのロボット三昧

10日で作る ラズパイ倒立振子ロボット
ジャイロセンサのチェックポイント ジャイロについて 技術情報 各種インフォメーション エプソン水晶デバイス

09年07月 もやねのロボット三昧
新入社員が制作実習でドローンの自作に挑戦した話 3 組込み技術ラボ

ジャイロが道を間違えた アナログ デバイセズ
ジャイロのドリフト補正を改良 自作のいろいろ
技術情報 ジャイロセンサとは 原理 種類 特徴の解説は多摩川精機

ジャイロセンサの温度ドリフト予測 Root2 のブログ 夢は逃げない 逃げるのはいつも自分 夢を持って自分を奮い立たせ 夢を叶え そう言い聞かせて数十年 笑 みんカラ

1996 号 ジャイロのドリフト補正方法及び補正回路 Astamuse

ジャイロセンサ Ae Gyro Smd を使う からくり小箱

09年07月 もやねのロボット三昧
ジャイロセンサのチェックポイント ジャイロについて 技術情報 各種インフォメーション エプソン水晶デバイス
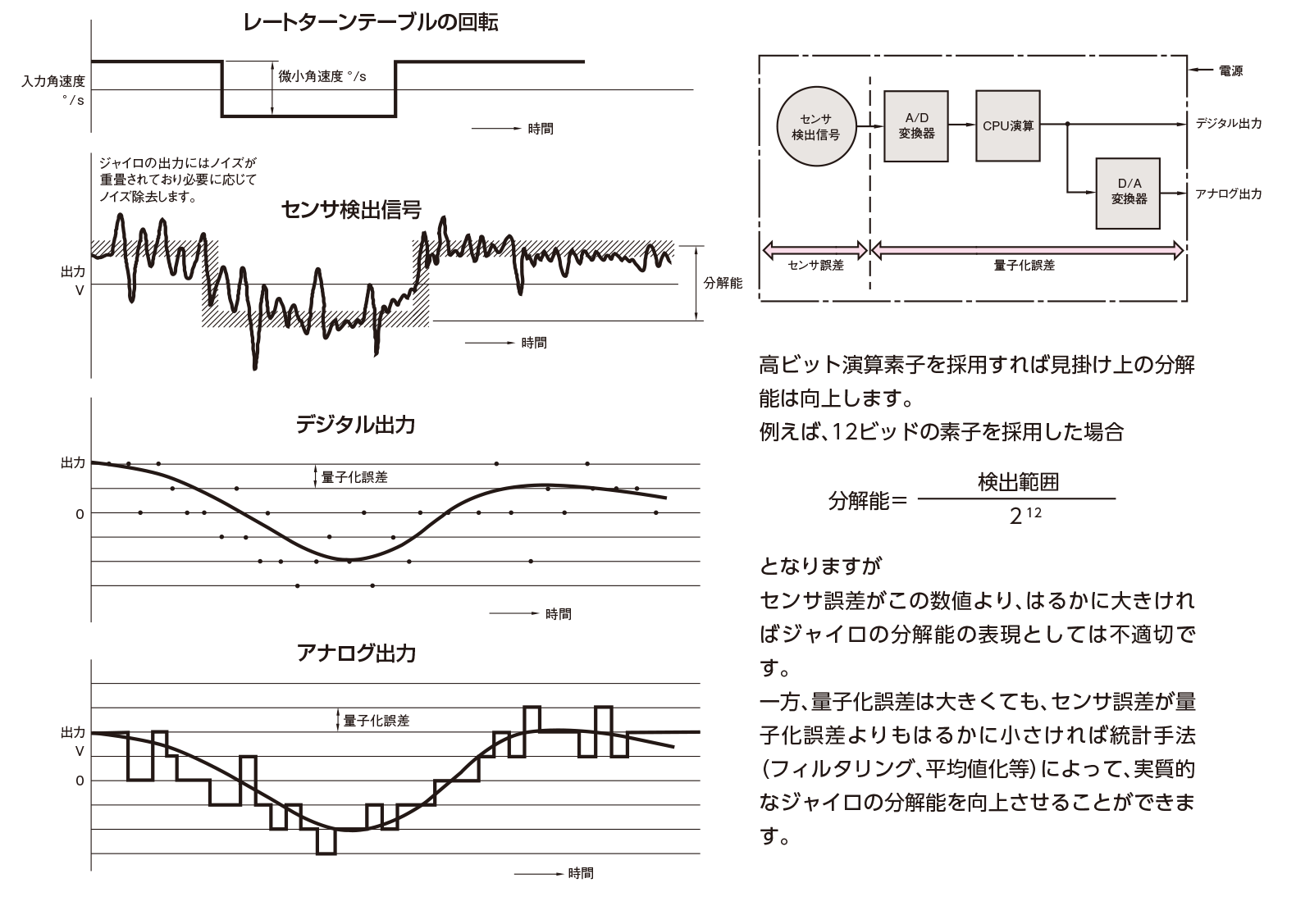
ジャイロの精度 概要 技術解説 多摩川精機

姿勢制御 Nekolab 資料庫
Grid Inc デジタルgセンサー Imu ステージア 250t Imu ダイレクト販売ページ

Mpu6050 X Raspberrypi X Python X Processing 相補フィルター Complementary Filter 極力ローコスト ロボット製作 ブログ

ジャイロセンサ Enc 03r のドリフト補正 その3 からくり小箱

東芝 研究開発センター 研究開発ライブラリ 角度を直接検出する高精度ジャイロセンサー の小型モジュールを開発 小型化 高精度化により ロボット 無人搬送車 ドローン等の小型機器への搭載 実証実験が可能に
ジャイロセンサのチェックポイント ジャイロについて 技術情報 各種インフォメーション エプソン水晶デバイス
ジャイロセンサ 角速度センサ

09 0925号 ジャイロセンサのドリフト抑制方法 Astamuse
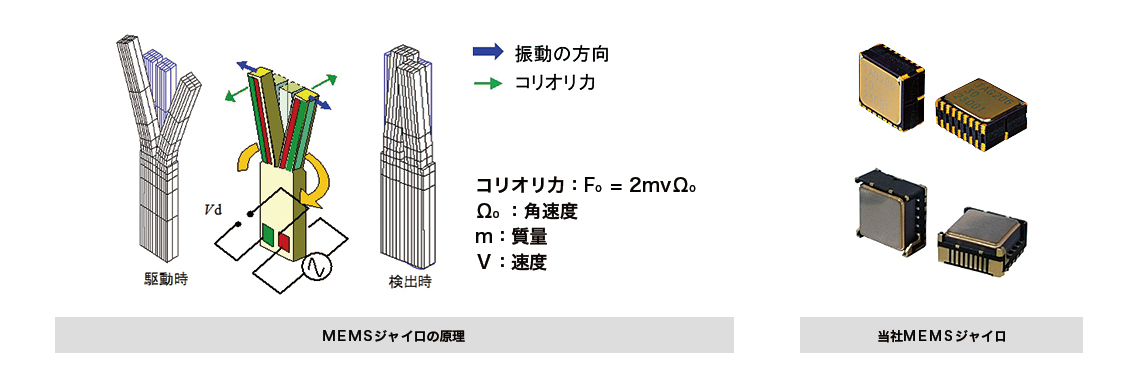
技術情報 ジャイロセンサとは 原理 種類 特徴の解説は多摩川精機
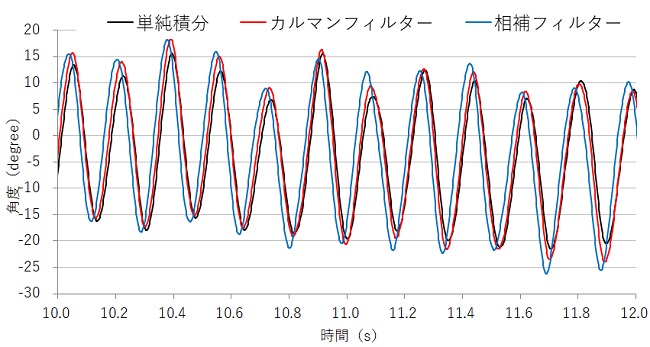
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ

ロボットのための慣性計測装置 Imu 入門 Myenigma

Amazon P D Dasmikro ラジコン カー ドリフトレーシングカー ステアリング出力用 マイクロ ジャイロ センサー ラジコン ドローン 通販
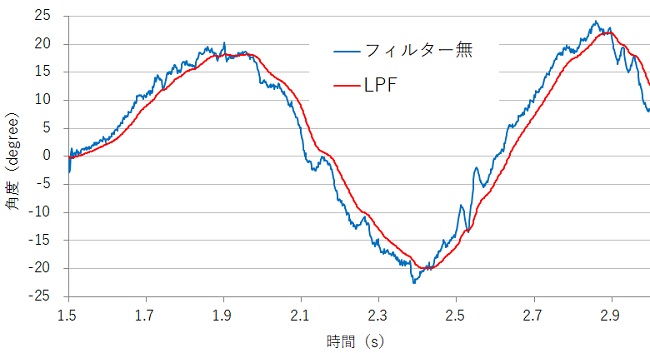
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ

加速度ジャイロセンサー Mpu 6050 の読み出し速度に関する考察 フラチキさんブログ

Amazon Co Jp Jasnyloo Skyrc Gc301ミニジャイロジャイロスコープ Rcカー用ドリフトレーシングカーステアリング出力統合型軽量設計 スポーツ アウトドア
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ

9軸センサの加速度 ジャイロで姿勢推定しようとしてドリフトが止まらなかった話 Qiita

ジャイロ 加速度センサの統合 もやねのロボット三昧
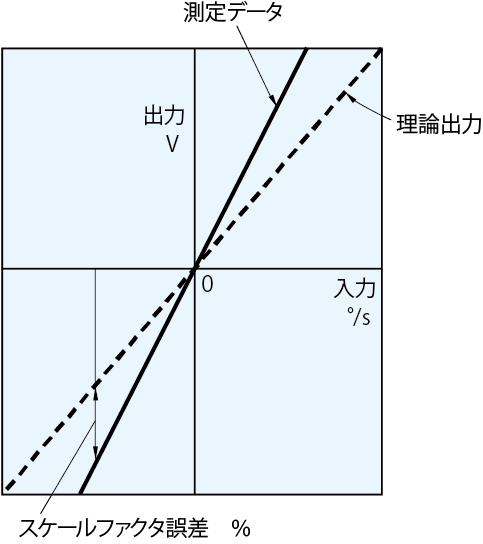
ジャイロの精度 概要 技術解説 多摩川精機

ジャイロセンサ Enc 03r のドリフト補正 その5 からくり小箱
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ

08 号 センサドリフト補正装置及び補正方法 Astamuse

ジャイロ カルマンフィルタ もやねのロボット三昧

Jpb2 ジャイロセンサのドリフト抑制方法 Google Patents
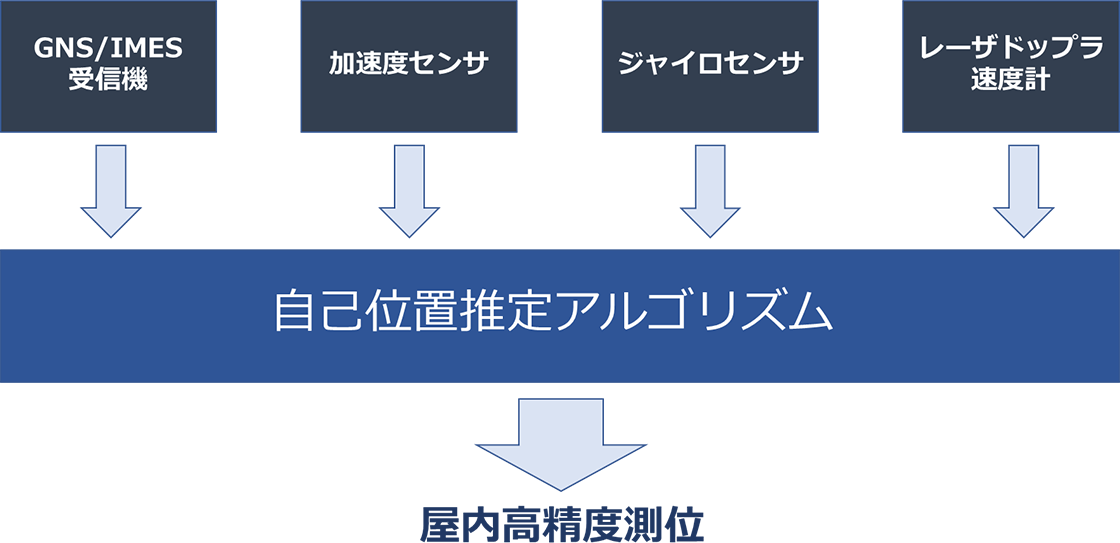
カーナビが地下駐車場で使える イネーブラー株式会社

00 号 ジャイロスコープ Astamuse

09 0925号 ジャイロセンサのドリフト抑制方法 Astamuse

Jpa ジャイロセンサのドリフト抑制方法 Google Patents

1996 号 ジャイロのドリフト補正方法及び補正回路 Astamuse
ジャイロセンサ 角速度センサ

姿勢制御 Nekolab 資料庫
Amazon Co Jp Saikogoods Skyrc Gc301 Rcドリフトレーシングカーステアリング出力用ミニジャイロジャイロセンサー カラー ブラック カメラ
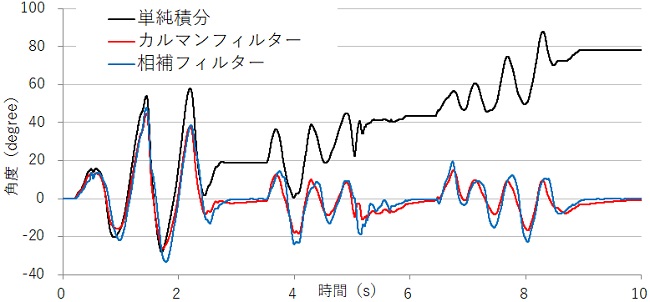
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ
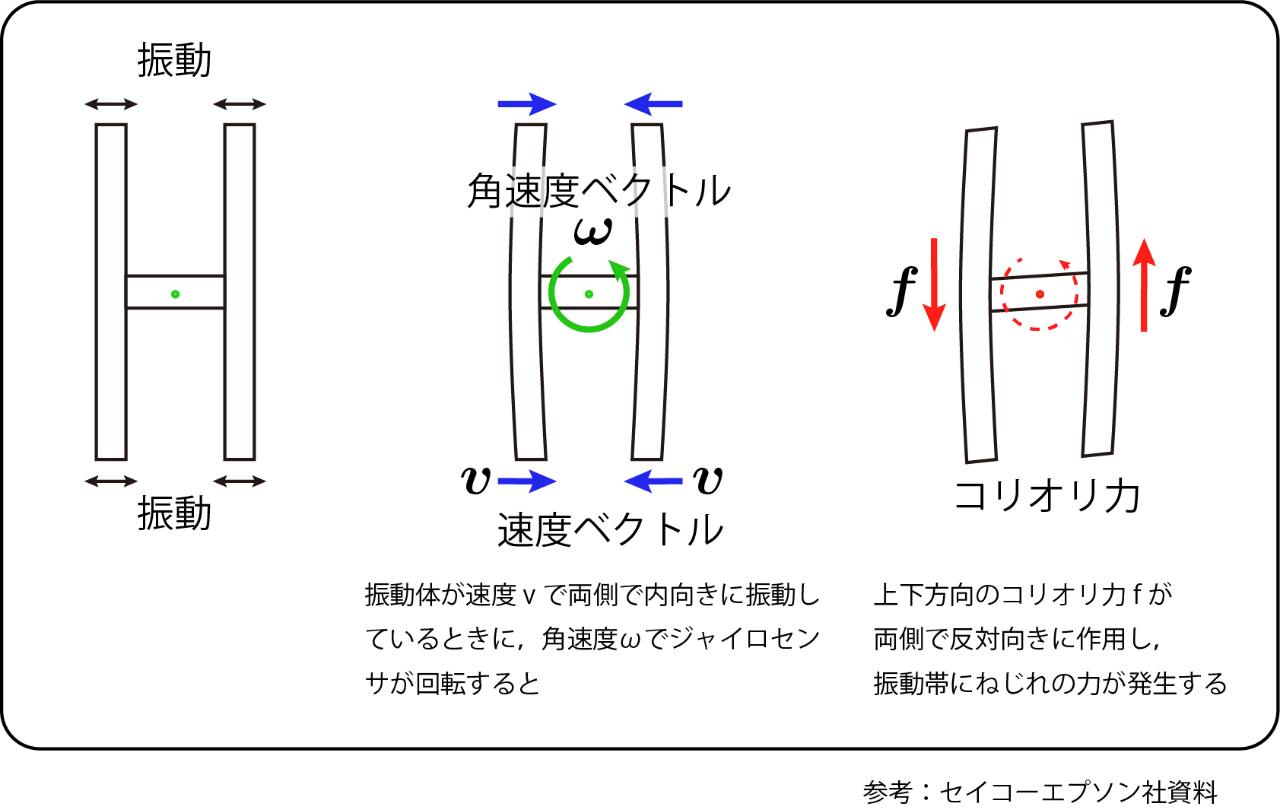
ジャイロセンサの基礎 株式会社スポーツセンシング

09年07月 もやねのロボット三昧

08 号 センサドリフト補正装置及び補正方法 Astamuse

09 0925号 ジャイロセンサのドリフト抑制方法 Astamuse
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ
マイコンの実験 Kalman Filterの実験 2 2

ジャイロが道を間違えた アナログ デバイセズ

Amazon Bestesell Gyc400 Memsジャイロスコープは 超小型リモートコントロール車のリモートコントロールドリフト車リモートコントロールボートに適しています ラジコン ドローン 通販

ジャイロセンサ Ae Gyro Smd のドリフト補正 Youtube

1996 号 ジャイロのドリフト補正方法及び補正回路 Astamuse
ジャイロのドリフト補正と比較 カルマン 相補フィルター 自作のいろいろ

Jpa ジャイロセンサのドリフト抑制方法 Google Patents

10日で作る ラズパイ倒立振子ロボット



